Democratizing Embodied AI.
XLeRobot-Pro is a highly capable, $1,200 bimanual mobile manipulator. Designed for researchers and labs to rapidly deploy imitation learning, VLA models, and autonomous robotic agents.
Why XLeRobot-Pro?
The barrier to entry for advanced robotics research has traditionally been gated by six-figure hardware. XLeRobot-Pro bridges the gap between simulation and reality by providing a robust, highly reproducible physical platform.
By leveraging mostly 3D-printed components, affordable hardware, and a mobile base, labs can scale their data collection pipelines and deploy fleet-level reinforcement learning without massive capital constraints.
System Capabilities
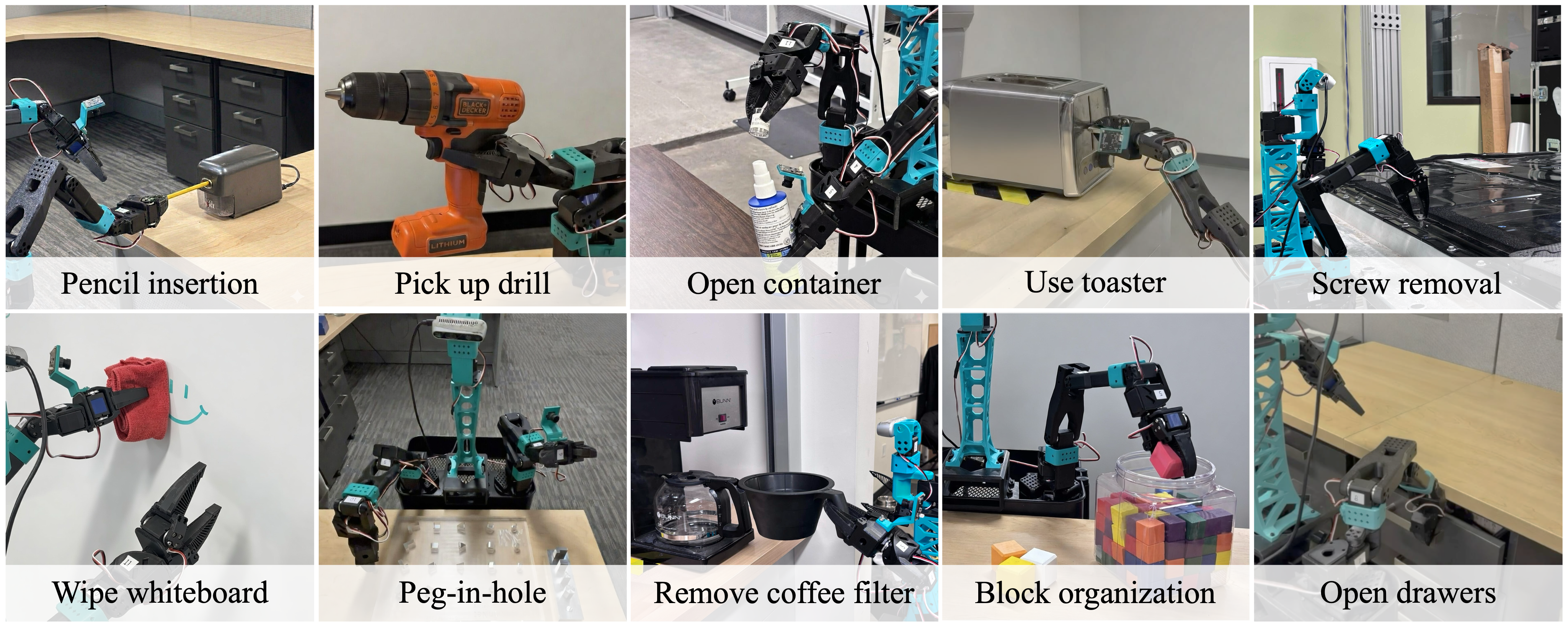
Native integration with the Hugging Face LeRobot framework allows for out-of-the-box data collection and policy training. See the system in action below.
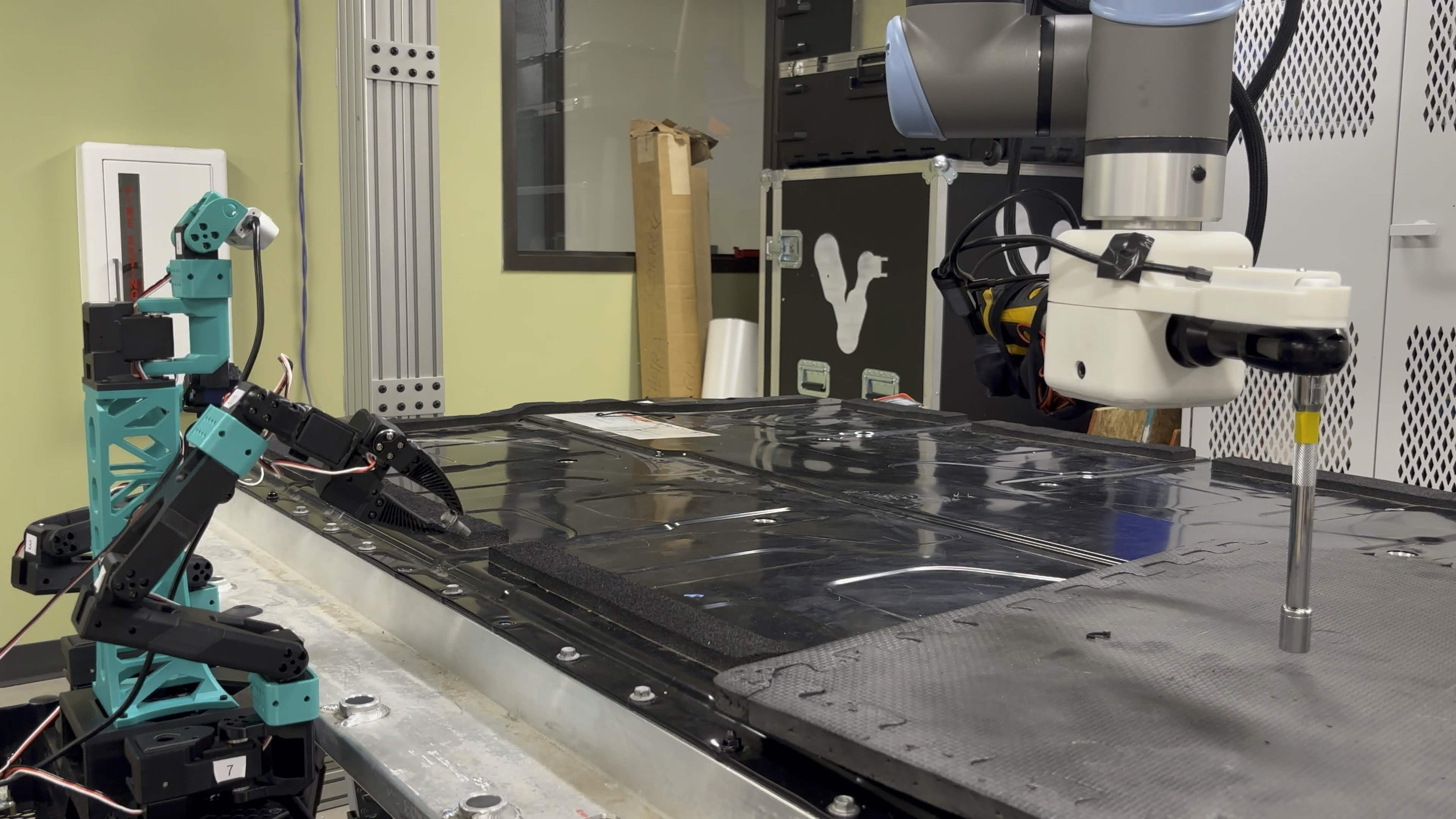
Bimanual Teleoperation: Smooth leader-follower kinematics using dual SO-100 arms for high-fidelity dataset collection.
Autonomous Execution: Built-in SLAM execution capabilities for autonomous mapping.
Hardware Architecture
Designed for modularity. Swap compute nodes, upgrade sensor suites, or modify the chassis parameters to fit your specific research parameters.
SO-101 Arms
Providing high-fidelity 6-DOF movement for complex bimanual manipulation tasks.
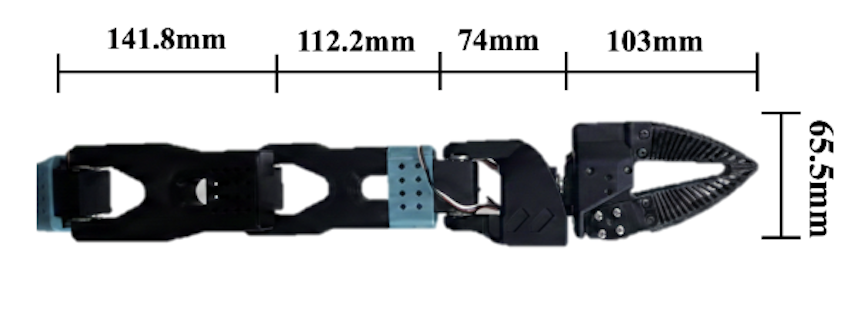
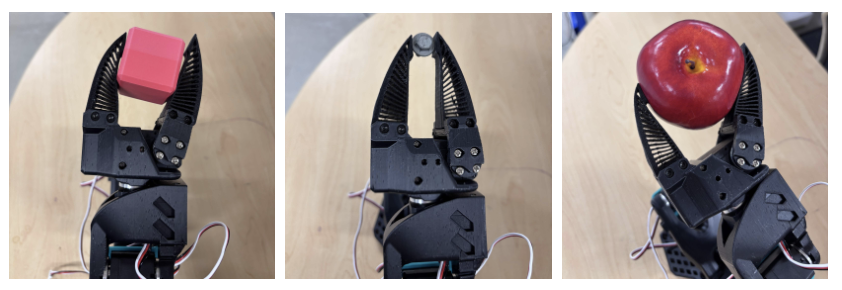
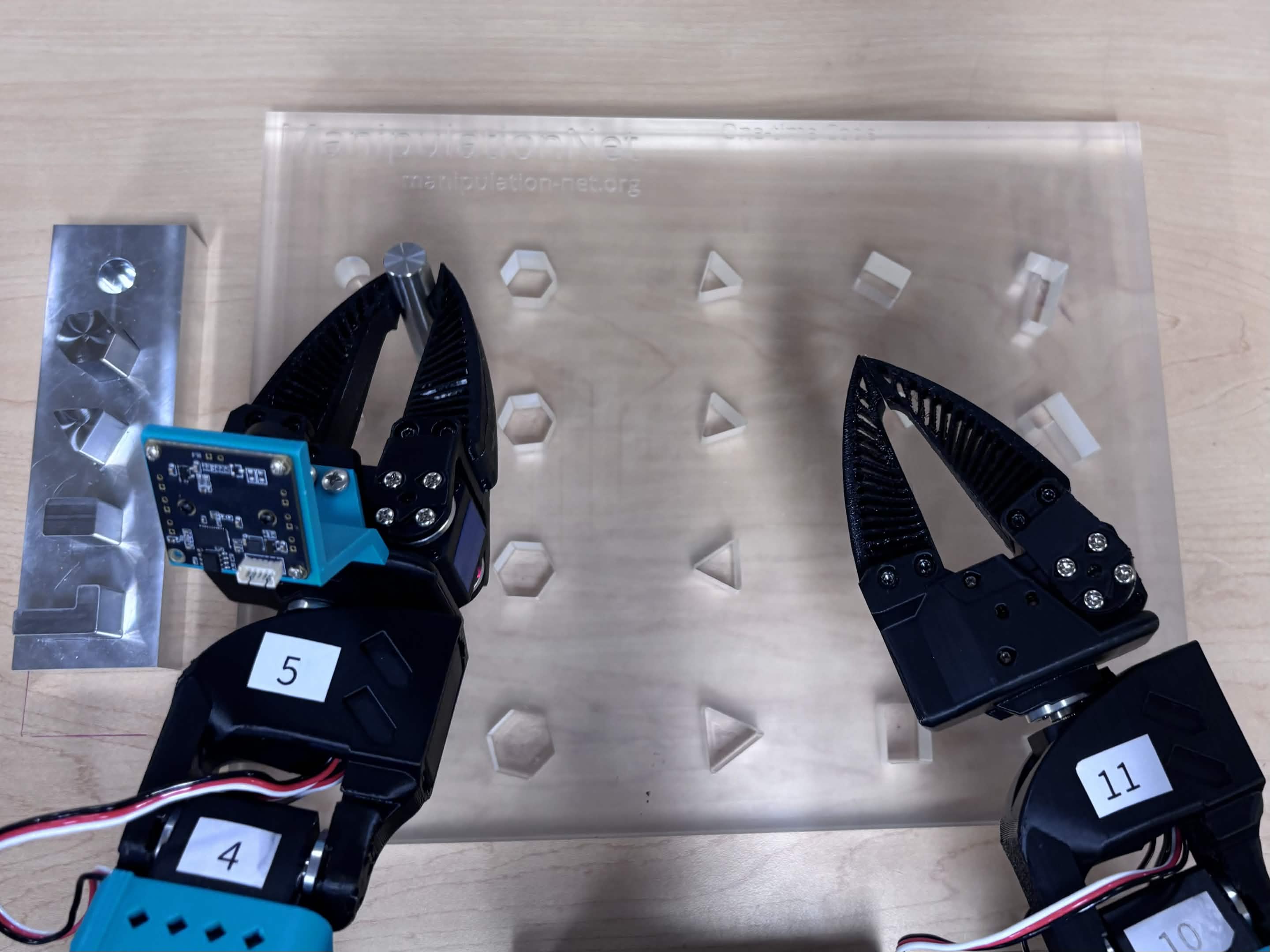
Fin-Ray End-Effectors
Enabling precision and compliant grasps across a wide variety of unstructured objects.
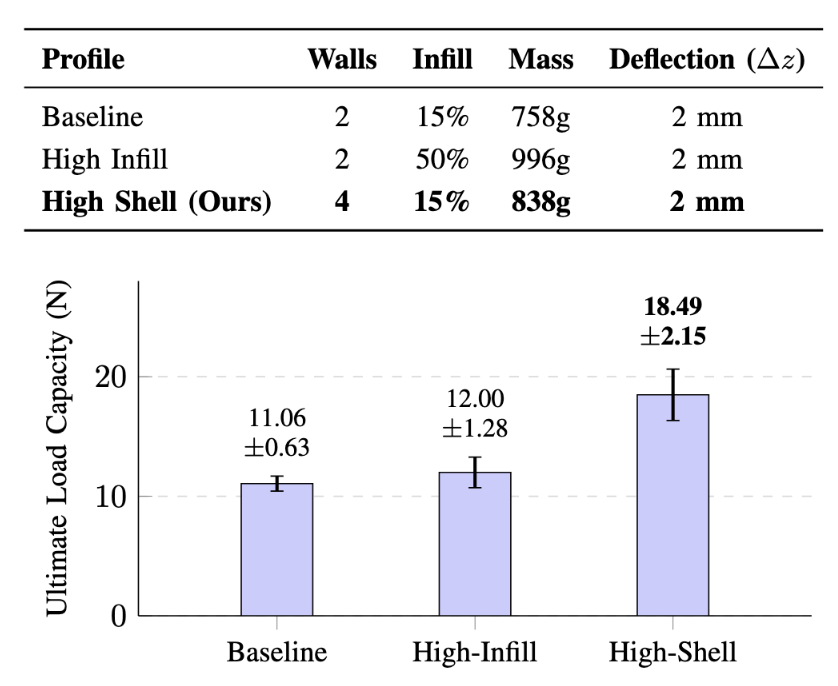
Functionally Graded Chassis
Ensuring structural stability and vibration damping during dynamic mobile operations.
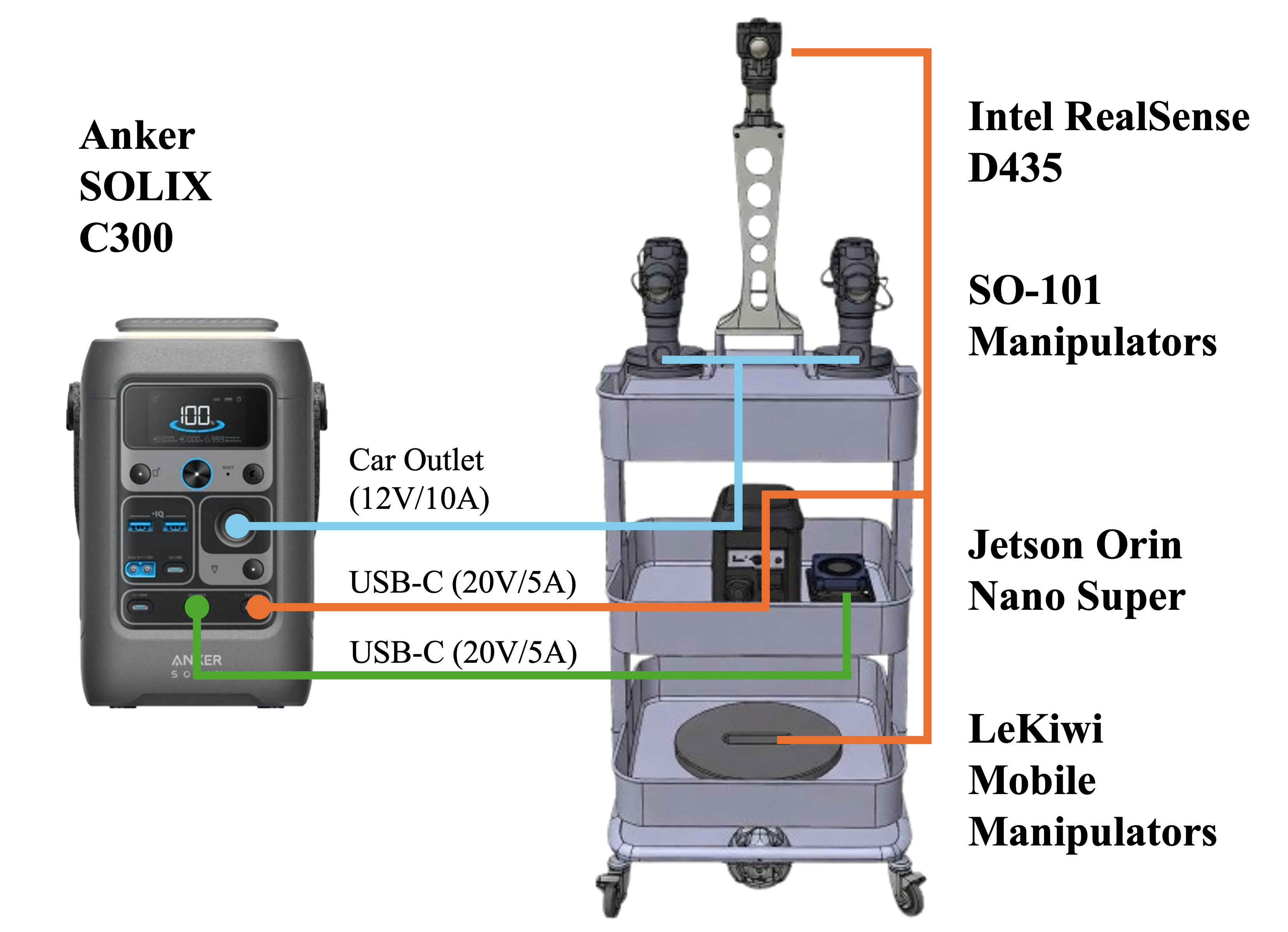
Compute Deck + Sensor Suite
Centralizing processing power and multi-modal perception for real-time autonomous decision making.
Software Stack & Algorithms
The XLeRobot-Pro utilizes a hybrid approach, merging precise classical robotics control with state-of-the-art end-to-end learning models.
Inverse Kinematics (IK) via Pink
Leveraging the Pink (Pinocchio-based Inverse Kinematics) library to translate high-level spatial objectives into precise, singularity-robust joint movements in real time.
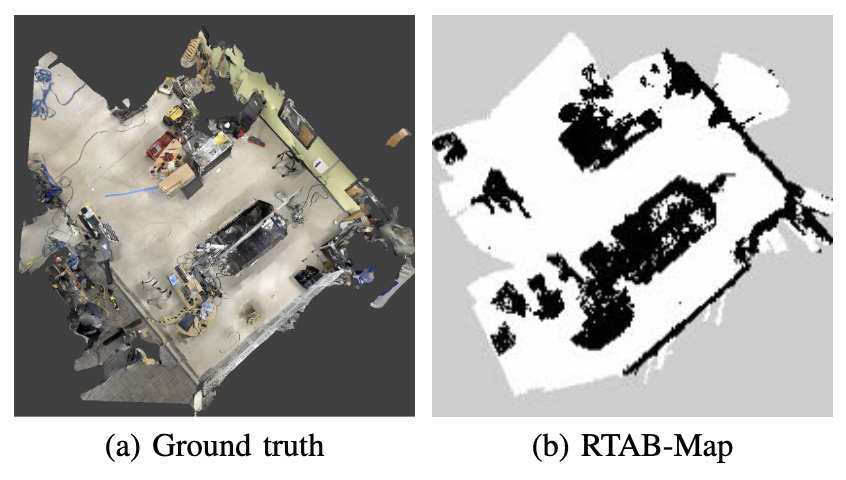
SLAM & Navigation
Implementing a ROS 2 pipeline using RTAB-Map and a RealSense D435 for visual odometry and localization. Global planning and closed-loop execution are handled by Nav2 utilizing 2D costmaps.
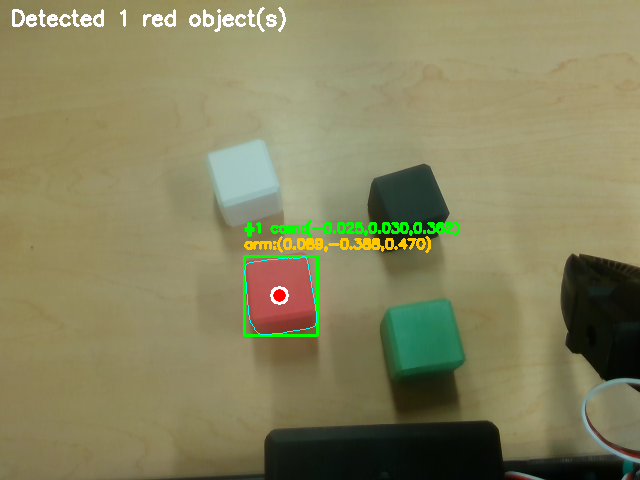
Visual Perception
Extracting critical visual features via HSV thresholding and contour detection to isolate target objects, providing real-time geometric priors for upstream algorithms.
LeRobot Integration
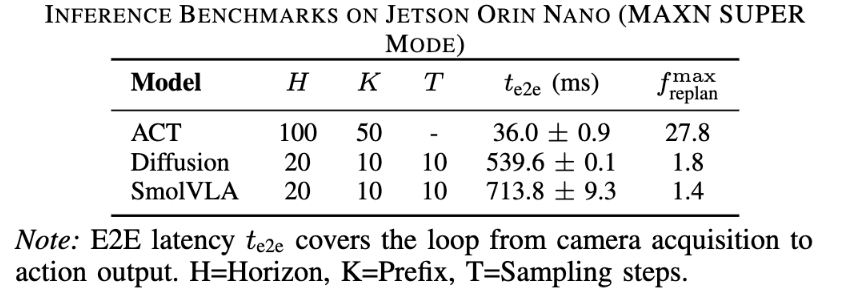
Native support for the Hugging Face LeRobot framework, streamlining the pipeline from standardized data collection to end-to-end policy training (e.g., Action Chunking with Transformers).
Hardware Overview & Specifications
XLerobot is a dual-arm mobile robot built from affordable, widely available components. Below covers the physical system requirements and limitations.
System Specifications
~12 kg
0.5–1.25 m
~40 cm (per arm)
600–1000 g
3 omni wheels
10+ hours
Anker SOLIX C300
Known Limitations
See the Build Guide for more details.
Credits & Acknowledgements
Project Creators
XLeRobot-Pro was developed and refined by Artemis Shaw, Chen Liu, Justin Costa, Rane Gray, Alina Skowronek, Kevin Diaz, Nam Bui, Nikolaus Correll.
Core Frameworks
- LeRobot: Built upon the foundational work of the Hugging Face LeRobot team.
- XLeRobot: Referencing the architectural design and initial implementation by Vector-Wangel.
Ready to start?
Start Building ↗